Already have an idea which application you want? Fill out a RFQ to get in touch
- Home
- Products
Positech machines are designed and built from the ground-up dependent on your specifications and requirements.
Our Conco line of products feature standard products with quick leadtimes that will get your operation up and running as quickly and efficiently as possible.
Does your application require something outside of your regular industrial manipulator? We'll work with you to custom design application solutions that will be exactly what you need.
Beyond our base machines, Positech can also custom design end-effector tooling that will meet your part and operator needs. Tooling can include specialized pneumatic, electric, and hydraulic circuitry.
- Solutions
- About
- Support
- Careers
- Contact Us


Truck Engine Flywheel
- Industries: Metal Fabrication, Tire
- Positioning Challenges: Engine Handling
Problem:
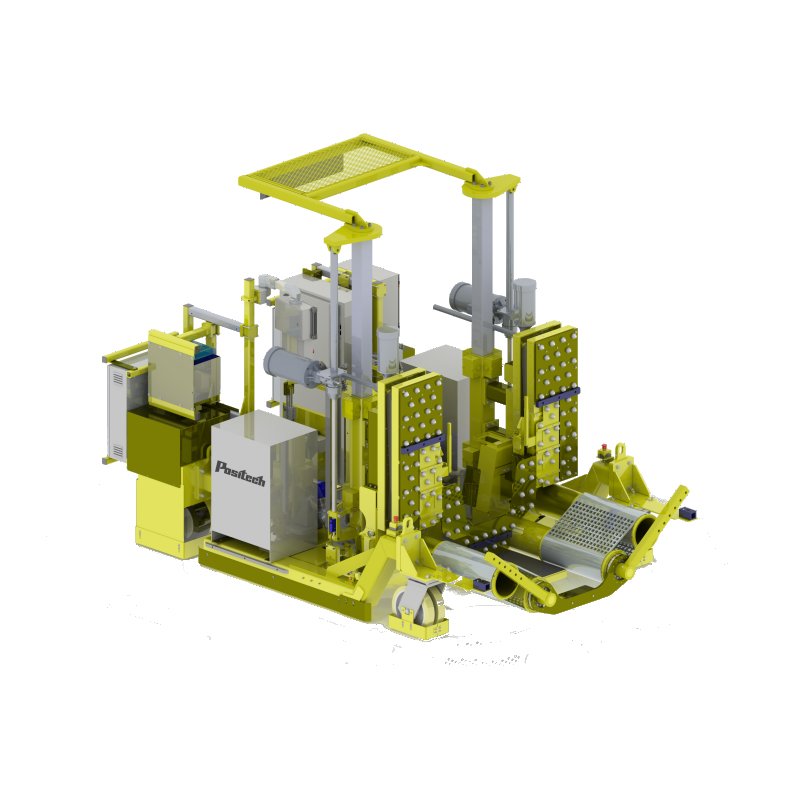
Multiple parts to be handled. The dunnage and bell housing create clearance restrictions above, below, and around the part. This leaves the face of the flywheel as the only exposed surface for gripping. The gripper cannot interfere with power tool access for driving in the attachment bolts. The entire process must be completed within a 54 second cycle time.
Application:
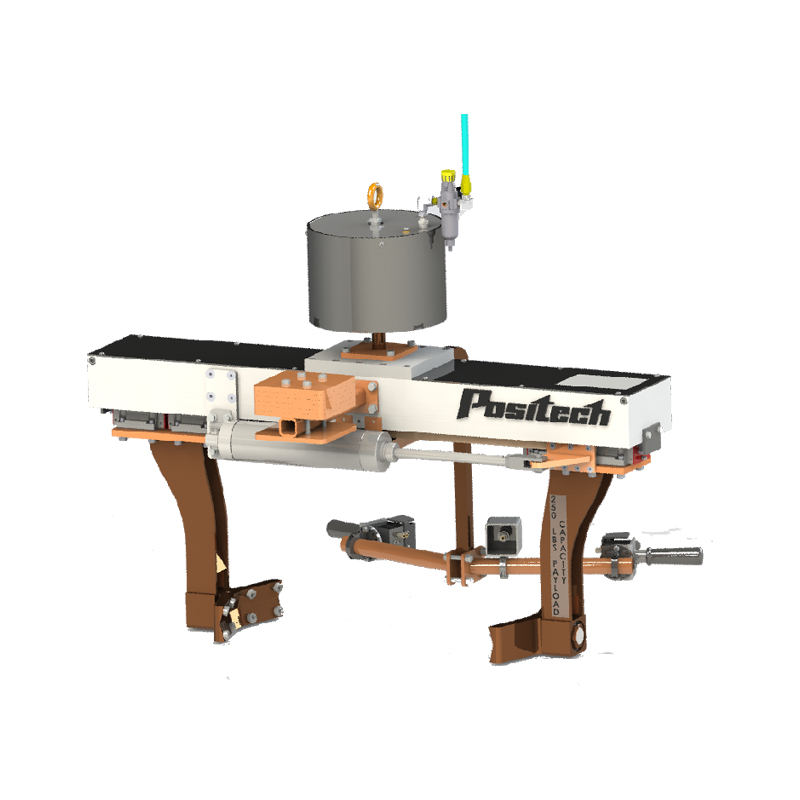
Pick up the flywheel from a dunnage tray, pitch it up 90° and transfer it inside of the engine bell housing onto a guide pin. Two pre-staged bolts on the flywheel are then fastened to the engine so that the manipulator can release the part.
Solution:
A floor-mounted ReactionArm® Manipulator (RA-3P) with 26 1/2″ of vertical travel and 112″ of radial reach. Vacuum sensed automatic activation of balance controls and 360° continuous rotating manifold vacuum system. Spring-loaded alignment pins and bolt driver assemblies. Compact pitching end joint.